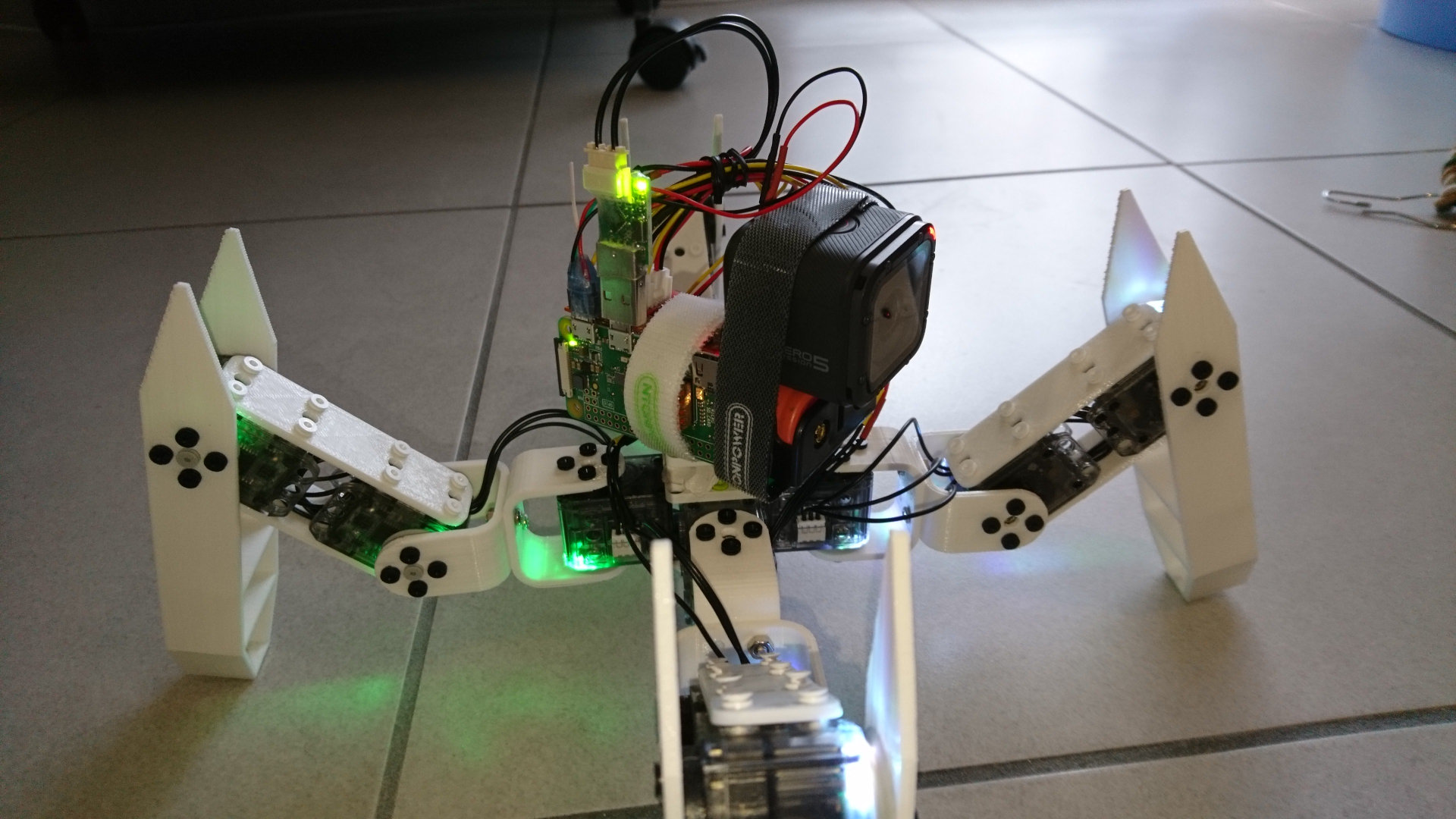
A cool open-source DIY parametric robotic platform.
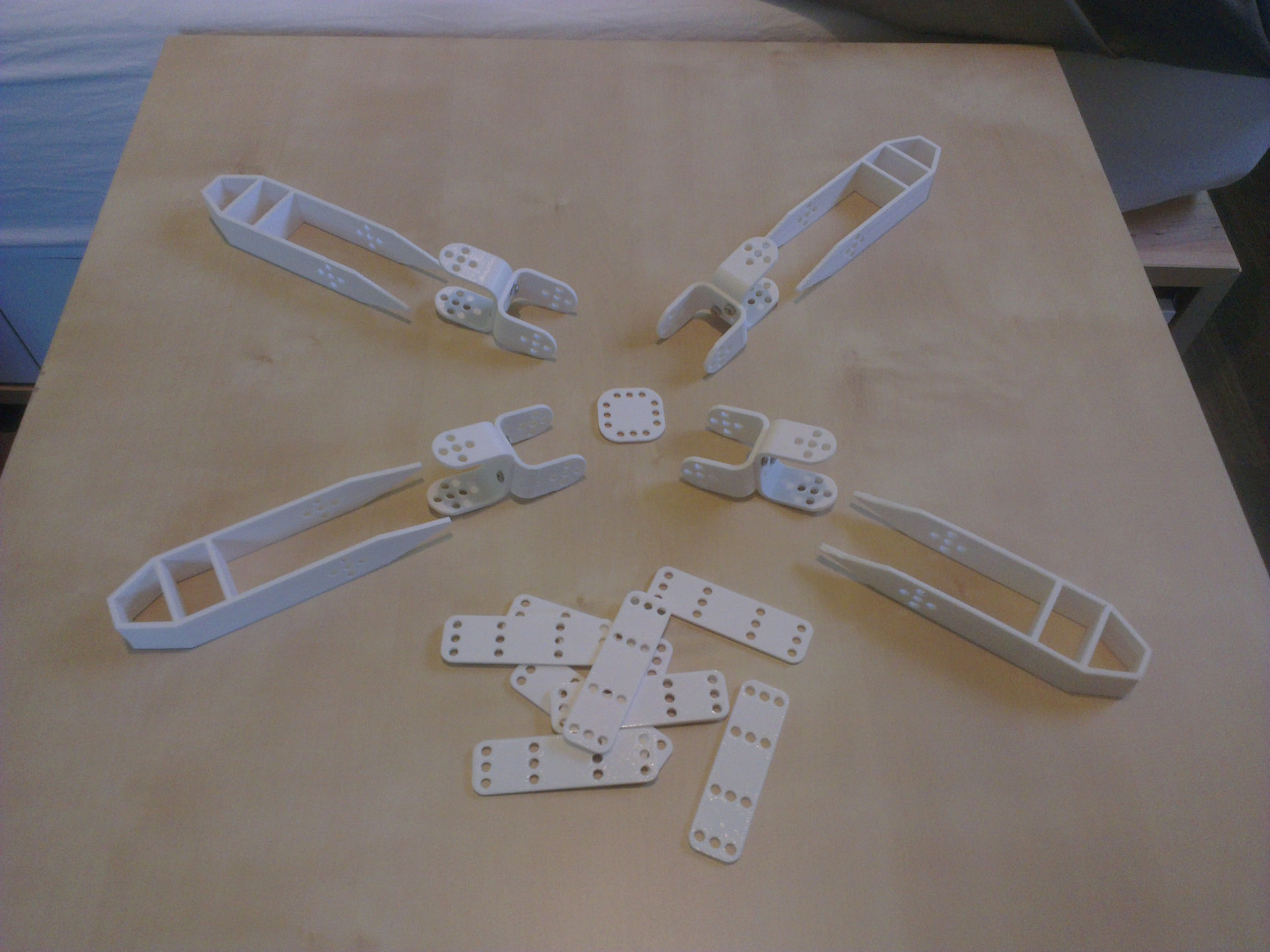
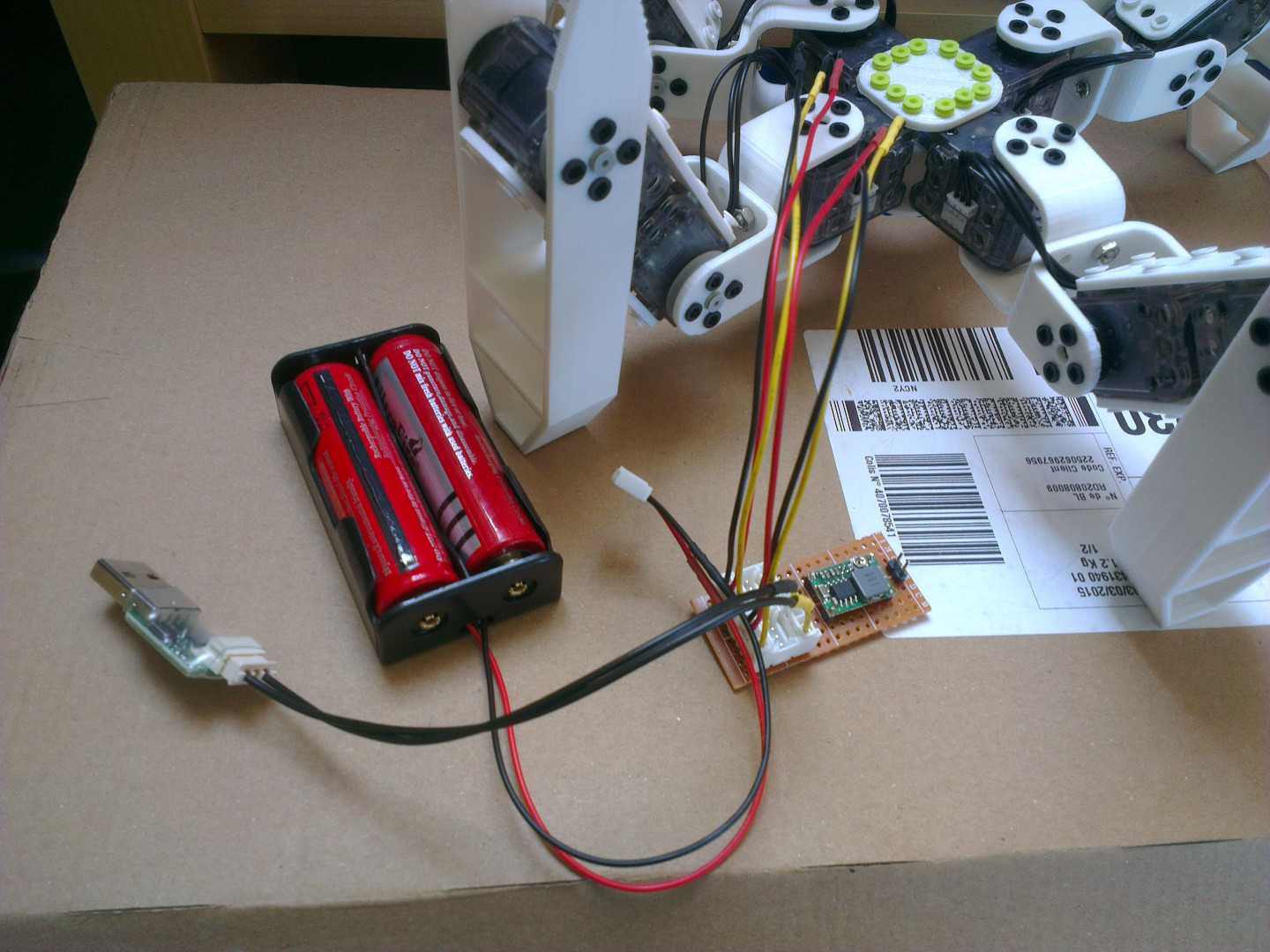
❝Metabot is a robotic platform that you can build and program yourself. It relies on standard components (motors, electronics, battery ...) and on 3D printable parts.❞
GitHub page Photos gallery Metabot websiteplatform
embedded linux
license
CC-BY-SA